Face Verification Library
Introduction
The Face Verification Library is a portable C++ library for face verification, designed for real-time processing on client devices (mobile and desktop).
The SDK provides wrappers in the following languages:
- C
- Python
- C# (.NET)
Features
- Face detection
- Face embedding extraction for verification
- Embedding comparison with similarity scoring
- Async API with both
std::futureand callback interfaces - Configurable concurrency
- Support for 3rd party face detectors
- Cross-platform (desktop, mobile)
Supported Platforms
Hardware Requirements
- CPU: Any modern 64-bit capable CPU (x86-64 with AVX, ARM8)
- GPU: No special requirement
- RAM: 2 GB of available RAM required
- Camera: Minimum resolution: 640x480
Software Requirements
The SDK is regularly tested on the following operating systems:
Platform / Architecture Support
Available APIs
- C++ - Core native API
- C - C-compatible API for FFI integration
- Python - Python bindings via pybind11
- .NET - C# bindings with async/await support
API Comparison
Create verifier
- C++:
FaceVerifier() - C:
fvl_face_verifier_new() - Python:
FaceVerifier() - .NET:
FaceVerifier()
Detect faces
- C++:
detectFaces() - C:
fvl_face_verifier_detect_faces() - Python:
detect_faces() - .NET:
DetectFacesAsync()
Embed face
- C++:
embedFace() - C:
fvl_face_verifier_embed_face() - Python:
embed_face() - .NET:
EmbedFaceAsync()
Compare faces
- C++:
compareFaces() - C:
fvl_face_verifier_compare_faces() - Python:
compare_faces() - .NET:
CompareFaces()
Get model name
- C++:
getModelName() - C:
fvl_face_verifier_get_model_name() - Python:
get_model_name() - .NET:
ModelName
Get SDK version
- C++:
getSDKVersion() - C:
fvl_face_verifier_get_sdk_version() - Python:
get_sdk_version_string() - .NET:
SdkVersion
Quick Links
Getting Started
API Reference
Quick Examples
C++
#include "faceverifier.h"
#include <opencv2/core.hpp>
#include <opencv2/imgcodec.hpp>
#include <iostream>
int main()
{
fvl::FaceVerifier verifier("model/model.realZ");
cv::Mat image1 = cv::imread("image1.jpg");
cv::Mat image2 = cv::imread("image2.jpg");
std::vector<fvl::Face> faces1 = verifier.detectFaces({image1.ptr(), image1.cols, image1.rows, static_cast<int>(image1.step1()), fvl::ImageFormat::BGR}).get();
std::vector<fvl::Face> faces2 = verifier.detectFaces({image2.ptr(), image2.cols, image2.rows, static_cast<int>(image2.step1()), fvl::ImageFormat::BGR}).get();
std::vector<std::vector<float>> embeddings1, embeddings2;
for (const Face& face: faces1)
embeddings1.push_back(verifier.embedFace(face).get());
for (const Face& face: faces2)
embeddings2.push_back(verifier.embedFace(face).get());
for (size_t i = 0; i < embeddings1.size(); ++i)
for (size_t j = 0; j < embeddings2.size(); ++j)
if (verifier.compare_faces(embeddings1[i], embeddings2[j]).similarity > 0.3) {
fvl::BoundingBox bbox1 = faces1[i].bounding_box();
fvl::BoundingBox bbox2 = faces2[j].bounding_box();
std::cout << "(" << bbox1.x << ", " << bbox1.y << ", " << bbox1.width << ", " << bbox1.height << ") from image 1 and";
std::cout << "(" << bbox2.x << ", " << bbox2.y << ", " << bbox2.width << ", " << bbox2.height << ") from image 2 are the same people";
std::cout << std::endl;
}
return 0;
}Python
import realeyes.face_verification as fvl
import cv2
verifier = fvl.FaceVerifier('model/model.realZ')
image1 = cv2.imread('image1.jpg')[:, :, ::-1] # opencv reads BGR we need RGB
image2 = cv2.imread('image2.jpg')[:, :, ::-1] # opencv reads BGR we need RGB
faces1 = verifier.detect_faces(image1)
faces2 = verifier.detect_faces(image2)
embeddings1 = [verifier.embed_face(face) for face in faces1]
embeddings2 = [verifier.embed_face(face) for face in faces2]
for i, e1 in enumerate(embeddings1):
for j, e2 in enumerate(embeddings2):
if verifier.compare_faces(e1, e2).similarity > 0.3:
print(f'{faces1[i]} from image 1 and {faces2[j]} from image 2 are the same person!')C#
using Realeyes.FaceVerification;
using OpenCvSharp;
using var verifier = new FaceVerifier("model/model.realZ");
using var image1 = Cv2.ImRead("image1.jpg");
using var image2 = Cv2.ImRead("image2.jpg");
// Convert OpenCV Mat to byte array
var imageData1 = image1.ToBytes();
var imageData2 = image2.ToBytes();
var header1 = new ImageHeader(imageData1, image1.Width, image1.Height,
image1.Width * image1.Channels(), ImageFormat.BGR);
var header2 = new ImageHeader(imageData2, image2.Width, image2.Height,
image2.Width * image2.Channels(), ImageFormat.BGR);
// Detect faces in parallel
var detectTask1 = verifier.DetectFacesAsync(header1);
var detectTask2 = verifier.DetectFacesAsync(header2);
using var faces1 = await detectTask1;
using var faces2 = await detectTask2;
// Embed all faces in parallel
var embeddingTasks = new List<Task<float[]>>();
foreach (var face in faces1)
embeddingTasks.Add(verifier.EmbedFaceAsync(face));
foreach (var face in faces2)
embeddingTasks.Add(verifier.EmbedFaceAsync(face));
var allEmbeddings = await Task.WhenAll(embeddingTasks);
var embeddings1 = allEmbeddings.Take(faces1.Count).ToArray();
var embeddings2 = allEmbeddings.Skip(faces1.Count).ToArray();
// Compare embeddings
for (int i = 0; i < embeddings1.Length; i++)
{
for (int j = 0; j < embeddings2.Length; j++)
{
var match = verifier.CompareFaces(embeddings1[i], embeddings2[j]);
if (match.Similarity > 0.3f)
{
var bbox1 = faces1[i].BoundingBox;
var bbox2 = faces2[j].BoundingBox;
Console.WriteLine($"({bbox1.X}, {bbox1.Y}, {bbox1.Width}, {bbox1.Height}) from image 1 and " +
$"({bbox2.X}, {bbox2.Y}, {bbox2.Width}, {bbox2.Height}) from image 2 are the same person!");
}
}
}Results
The Face objects consist of the following members:
- bounding_box: Bounding box of the detected face (left, top, width, height).
- confidence: Confidence of the detection ([0,1] — higher is better).
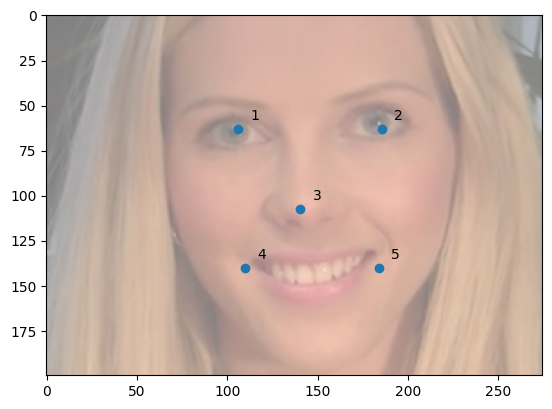
- landmarks: 5 landmarks from the face:
- Left eye
- Right eye
- Nose (tip)
- Left mouth corner
- Right mouth corner
3rd Party Face Detector
It is possible to calculate the embedding of a face which was detected with a different library. You can create a Face object by specifying the source image and the landmarks.
Dependencies
The public C++ API hides all the implementation details from the user, and it only depends on the C++17 Standard Library. It also provides a binary compatible interface, making it possible to change the underlying implementation without the need of recompilation of the user code.
Release Notes
-
Version 1.5.0 (15 Dec 2025)
- Improved performance on ARM CPUs
- Cleaner .NET API
- New public C API
-
Version 1.4.0 (7 Feb 2024)
- Experimental .NET support
-
Version 1.3.0 (9 Jun 2023)
- Add model config version 2 support
-
Version 1.2.0 (9 Jun 2023)
- Add support for AES encryption
-
Version 1.1.0 (3 Apr 2023)
- Add support for 3rd party face detectors
-
Version 1.0.0 (1 Mar 2023)
- Initial release
3rd Party Licenses
While the SDK is released under a proprietary license, the following open-source projects were used in it with their respective licenses:
License
Proprietary - Realeyes Data Services Ltd.